Rutgers Ankle

Project Overview
- What's the problem?
- Why Virtual Rehabilitation?
- What we've done?
- Who was included?
- The exercises/games.
- What have we found?
- Related publications.
- Supported by:
- Press Releases.
- Project Videos

What's the problem?
-
Why Virtual Rehabilitation?
What we've done?
-
Who was trained?
-
The game exercises.
The Baseline Exercise
-
Airplane game
Breakout 3D game
What have we found?
Plantarflexor increases were observed, though less than increases obtained with another type of equipment training the same amount of time. The dorsiflexor increases, however, were larger than those previously recorded for children training on the Kincom dynamometer. There was no significant improvement for in-phase movement. Anti-phase movement dropped from 0.76 sec to 0.42 sec, a 44.7% improvement towards a perfect 0.0 sec.
Two other children with CP finished training recently. Results await publication.
Gait speed improved by 21 cm/s. The six minute walk test results improved by 48 m. The four point improvement in the GMFM test was about the same as that previously reported in children training for the same amount of time on a Kincom dynamometer.
Children can develop hemiplegia from a perinatal brain injury (before birth) or an injury that affects only one side of their brain that occurs right after birth. When the injury causing hemiplegia occurs in the perinatal period or first few years of life, the resulting hemiplegia is known as "hemiplegic cerebral palsy." It is estimated that of the 800,000 children and adults living with cerebral palsy in the United States, approximately one-quarter are hemiplegic.
Virtual rehabilitation provides many benefits over traditional rehabilitation. The difficulty can be changed dynamically to a specific patient based on previous results (both short and long term). Interactive games and activities provide higher motivation than conventional clinical exercises. Perhaps most importantly is the real-time recording of game results, resulting in a better understanding of the progress made.
The Rutgers Ankle CP is a Stewart platform-type haptic interface coupled with a graphics workstation rendering therapeutic games. The system supplies six degrees of freedom (DOF) resistive forces to the patient's ankle using double-acting pneumatic cylinders. The robot top platform is connected to an ankle angle adapter to allow the patient’s foot to rest at 45° to 90°, a more comfortable alternative for patients with celebral palsy.
The workstation is connected through a robot controller box via a 128 kbps serial line. The controller is in charge of measuring the robot position and controlling its resistive forces in response to game events. The controller is composed of an Intel Core 2 Quad processor and microcontrollers to drive the air servo-valves. The system runs a Linux operating system with a software controller written in Java3D.
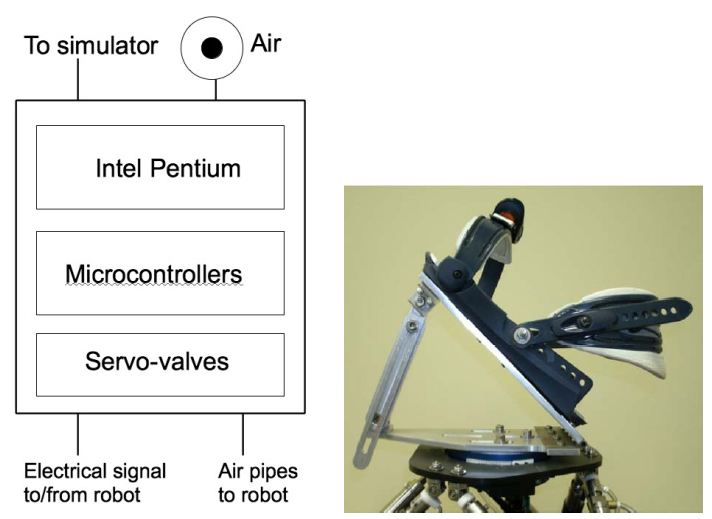
The Rutgers Ankle CP Setup
The first participant was a 7 year old child diagnosed with mild ataxic cerebral palsy. He had difficulty with speech, no cognitive delays and ambulated independently. The participant wore bilateral shoe inserts for pronation and trips/falls were a daily occurrence. He received physical, occupational and speech therapy in school once weekly, which was allowed to continue during this study.
The participant was recruited through word of mouth after the study was approved by the Institutional Review Boards of Washington University in St. Louis (WUSTL) and of Rutgers University. The threapy took place at the Human Performance Laboratory (WUSTL) in 2010.
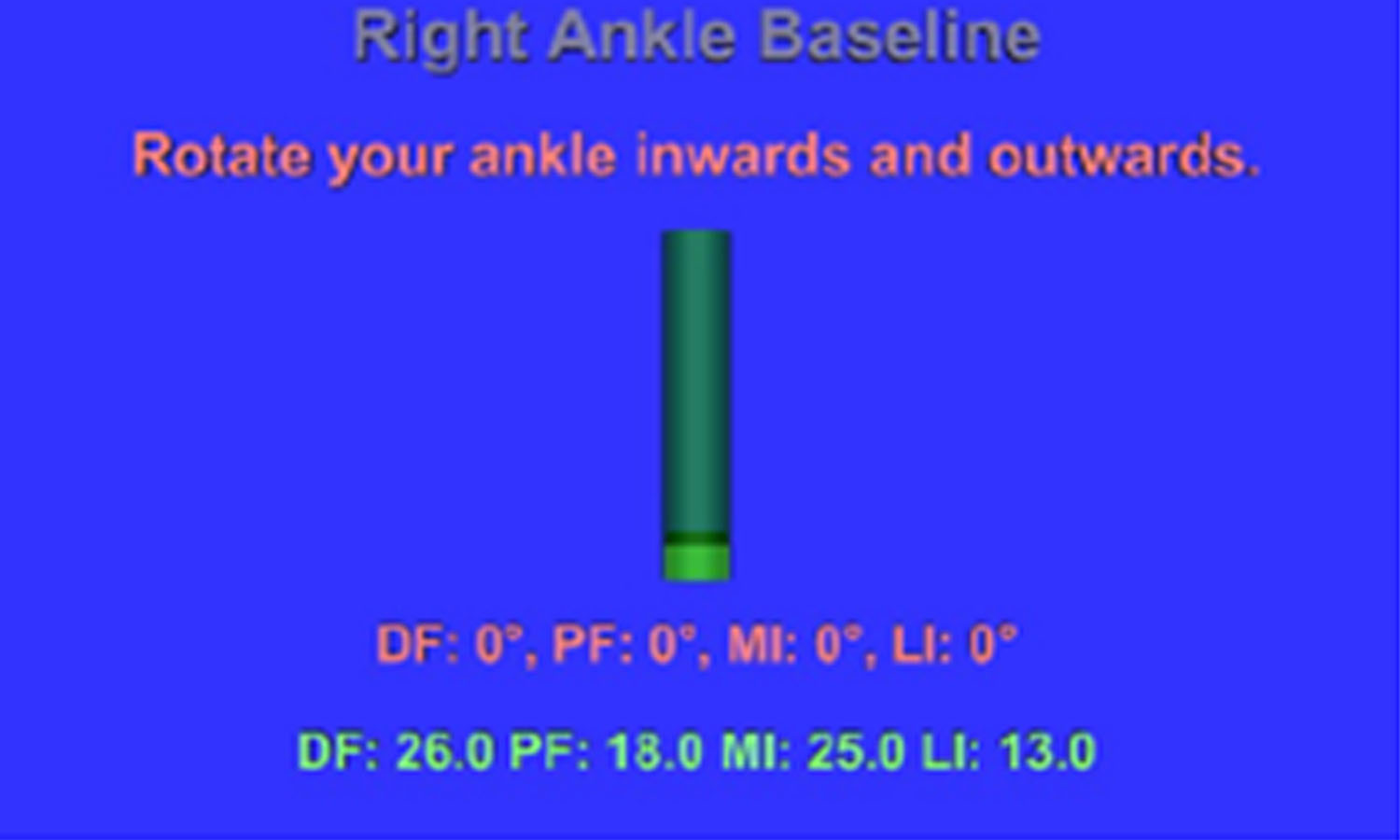
Each session started with a baseline. It measured the ankle mobility for the current rehabilitation session based on four parameters: inward, outward, tilting up and tilting down movement. The previous session values are shown, thus motivating the patient to exceed these limits. The ankle excursion in plantarflexion (pitching toes down) and dorsiflexion (pitching toes up) was used to adapt the games to the patient, in a given day.

In the Airplane exercise the patient, pilots a virtual airplane through target frames colored yellow (for visibility). The position of the frames follows a curve path with hills and valleys. The game score is based on the number of frames clearly passed through (100 points for a clear pass, -25 points for the plane hitting the frame, and -75 for a frame completely missed). At the beginning of the exercise the following parameters can be chosen: airplane velocity, air turbulence (storms), scene visibility (fog), and exercise time. When the haptic function is on, and a target frame is hit by the piloted airplane, the patient feels a fast up and down movement of the robot platform.
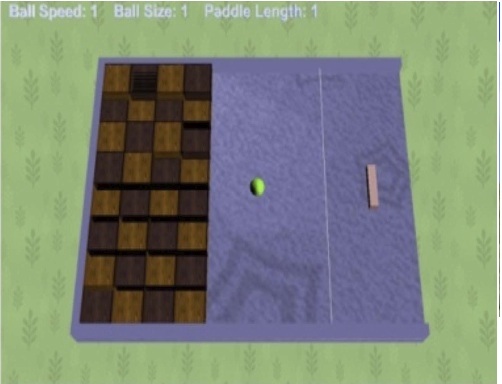
The Breakout 3D exercise was initially developed for arm rehabilitation on our prototype Rutgers Arm syste (See "Rutgers Arm" on our Projects Page). It was subsequently ported to the Rutgers Ankle CP system, such that the game avatar is a paddle controlled by the ankle and not by the forearm. The ankle movement controls the paddle to bounce balls so to destroy a wall of bricks, one brick at a time. The length of paddle, the brick size in the wall and the ball speed can be set at the beginning of the exercise. The score is incremented by 1 for each brick destroyed. The number of balls when missed by the paddle and leaving the table is counted and saved as a performance parameter. For this training the games were set to exercise just the ankle dorsiflexion and plantarflexion. The position of the brick wall depends on which ankle is being trained. The bricks are to the left of the screen if the right ankle in moving the paddle, and to the right side of the screen if the left ankle is used in the game.
Related publications.
-
M. Girone, G. Burdea, M. Bouzit, V.G. Popescu, and J. Deutsch, A Stewart Platform-based System for Ankle Telerehabilitation, invited article, Special Issue on Personal Robotics, Autonomous Robots, Vol. 10, pp. 203-212, Kluwer, March 2001. Full Text PDF
-
J. Yoon, J. Ryu, G. Burdea and R. Boian, Control Optimization of the Rutgers Ankle Rehabilitation Interface,Proceedings of Advances in Robot Dynamics and Control Symposium 2002, ASME International Mechanical Engineering Congress and Exposition, Paper IMECE2002-32655, November 17-22, New Orleans, Louisiana, USA, 2002. Full Text PDF
-
R.F. Boian, C.S. Lee, J.E. Deutsch, G. Burdea and J.A. Lewis, Virtual Reality-based System for Ankle Rehabilitation Post Stroke, 1st International Workshop on Virtual Reality Rehabilitation (Mental Health, Neurological, Physical, Vocational) VRMHR 2002 Lausanne, Switzerland, November 7-8, 2002, pp. 77-86, 2002. Full Text PDF
- D. Cioi, A. Kale, G. Burdea, J. Engsberg, W. Janes, S. Ross. Ankle Control and Strengthening for Children with Cerebral Palsy using the Rutgers Ankle CP - A case study. 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 2011; pp. 654-659. Full Text PDF
Supported by:
Press Releases
Project Videos
National Institutes of Health/NIBIB grant 5R21EB6533-2 and by a generous donation from Cristian and Andrea Francu.
![]() Click here to download Airplane-Rehab-video.avi
Click here to download Airplane-Rehab-video.avi
BACK TO TOP